Visual Inertial SLAM using EKF
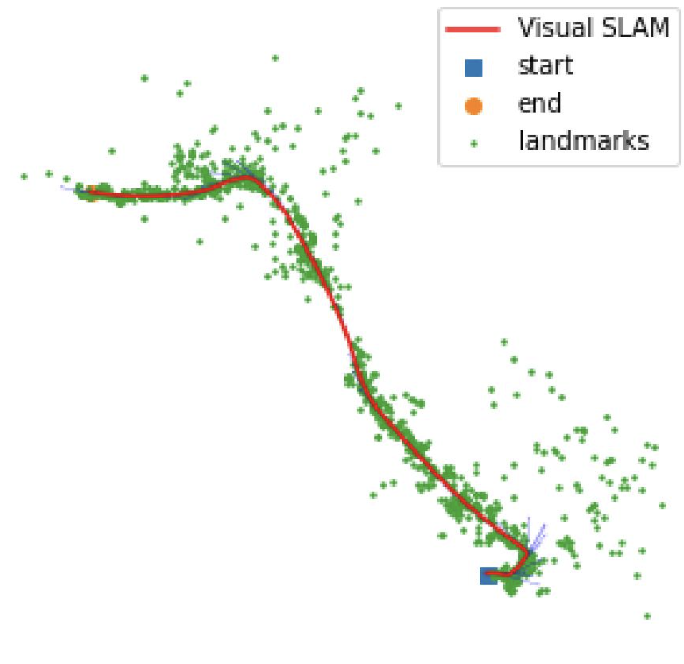
Built a 2D map of the environment and trajectory of the car using EKF prediction based on SE(3) kinematics with IMU data and EKF update based on stereo camera measurements from an autonomous car.

============== Under Construction ===============
Built a 2D map of the environment and trajectory of the car using EKF prediction based on SE(3) kinematics with IMU data and EKF update based on stereo camera measurements from an autonomous car.
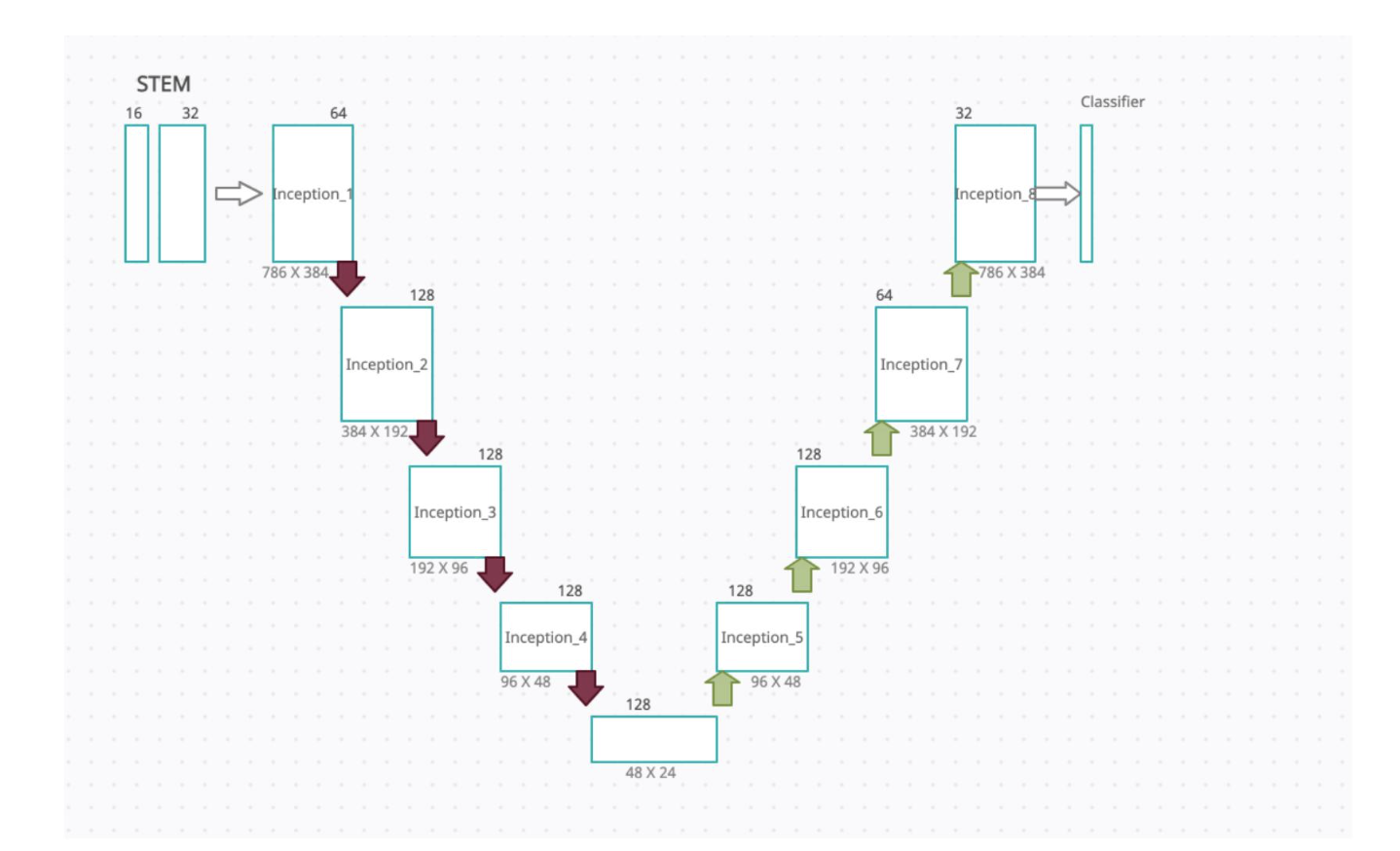
Developed an architecture inspired from UNet and Inception to segment images for Unstructured Driving Scenarios from TAS500 Dataset. The model was able to perform approx 5% better than the UNet, with 50% lesser parameters.
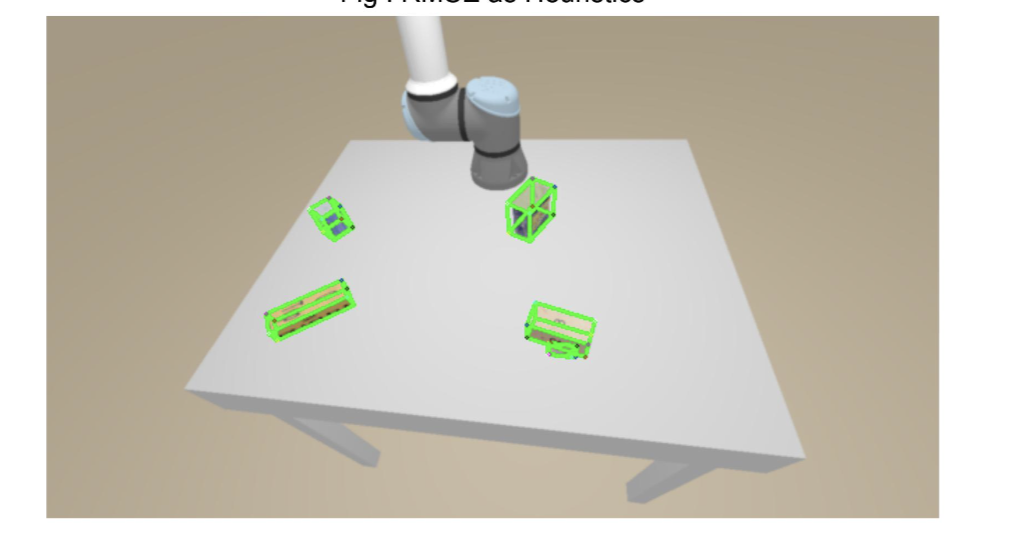
Developed an ICP and Neural Network (PVN3D) based model to predict 6D Pose with an accuracy of 92.8% for a 5 deg and 1 cm rotational and translation threshold respectively.

Built a 2D Occupancy grid of the environment and trajectory of the car using particle filter, based IMU for the prediction and LIDAR data for update.
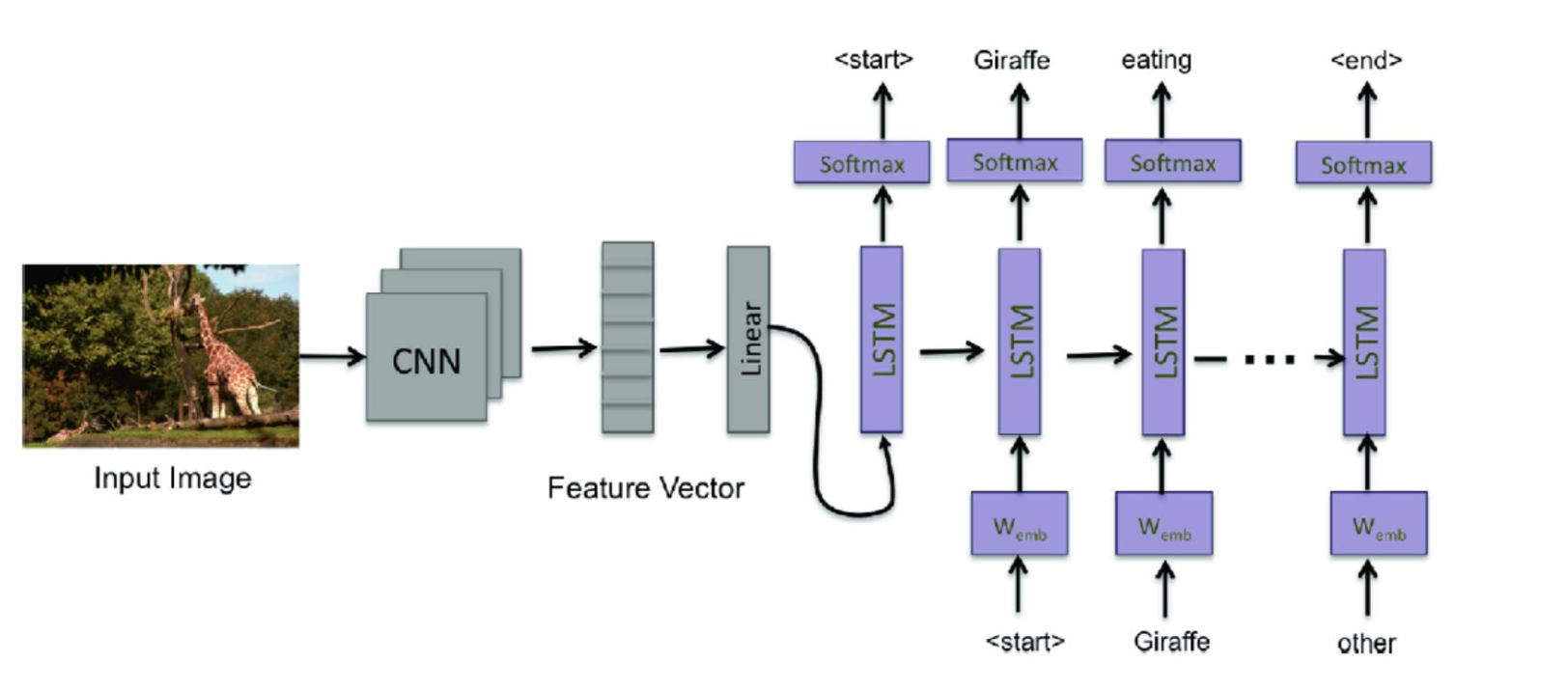
A neural network architecture was trained to predict the captions from image, which consisted of pre-trained ResNet50 as encoder and LSTM/RNN as decoder.