
Portfolio item number 1
Short description of portfolio item number 1
Portfolio item number 2
Short description of portfolio item number 2
projects
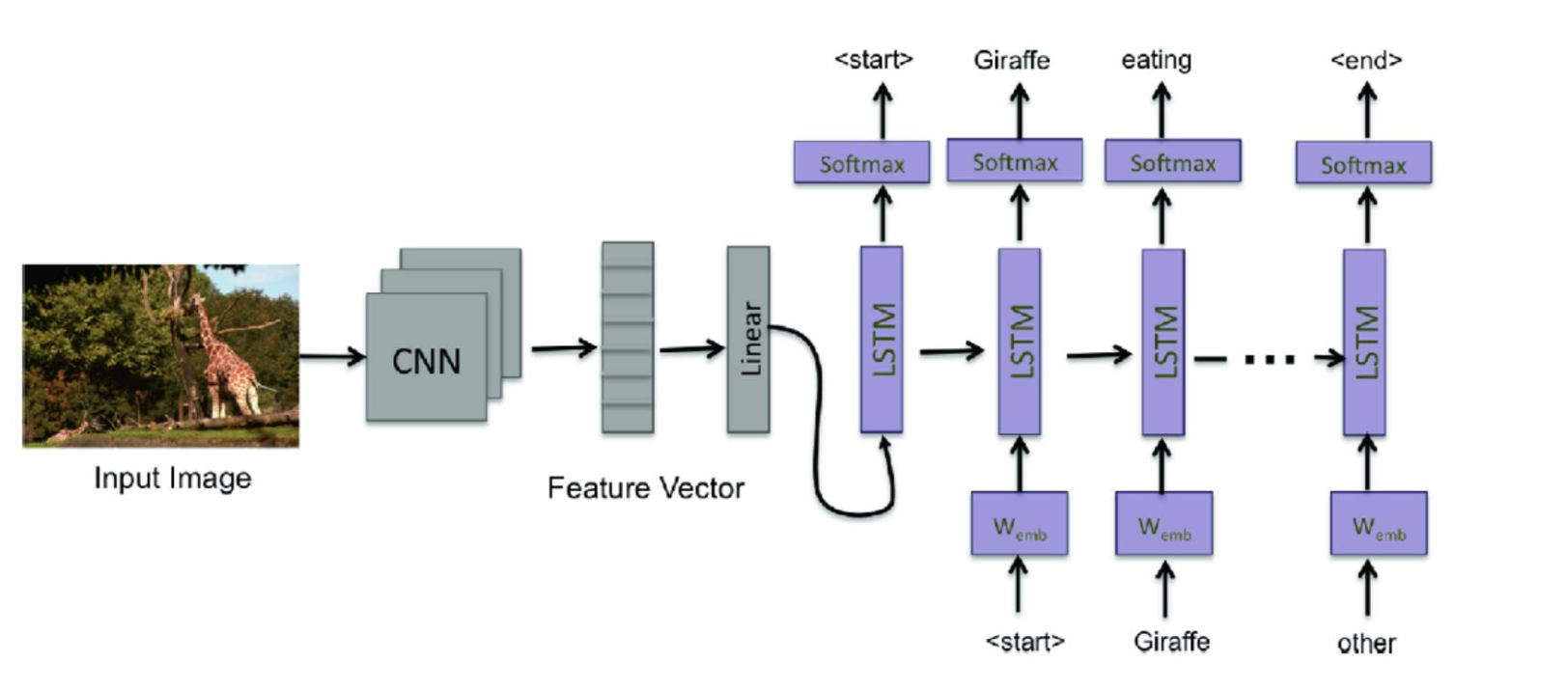
Image Captioning
A neural network architecture was trained to predict the captions from image, which consisted of pre-trained ResNet50 as encoder and LSTM/RNN as decoder.

SLAM using Particle Filter
Built a 2D Occupancy grid of the environment and trajectory of the car using particle filter, based IMU for the prediction and LIDAR data for update.
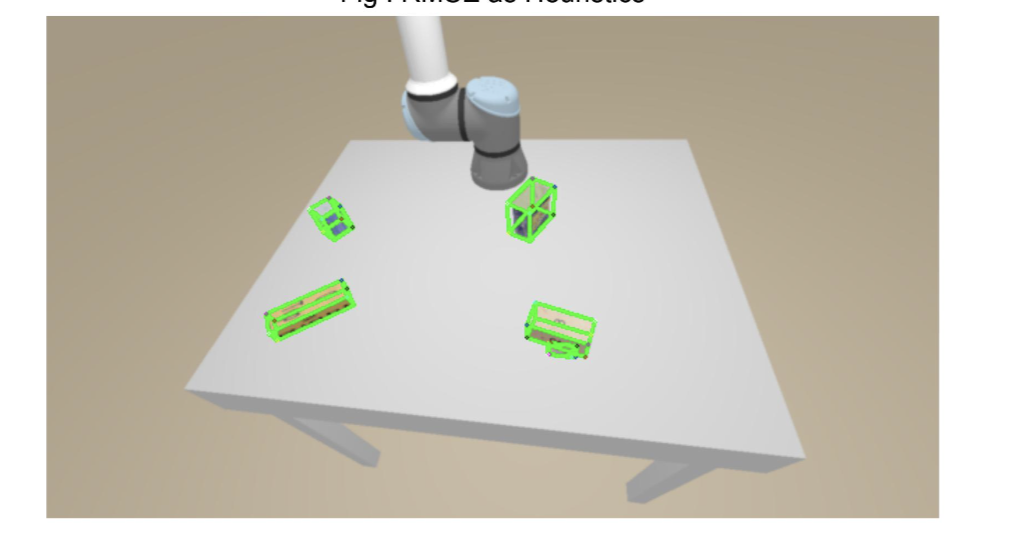
Pose Estimation
Developed an ICP and Neural Network (PVN3D) based model to predict 6D Pose with an accuracy of 92.8% for a 5 deg and 1 cm rotational and translation threshold respectively.
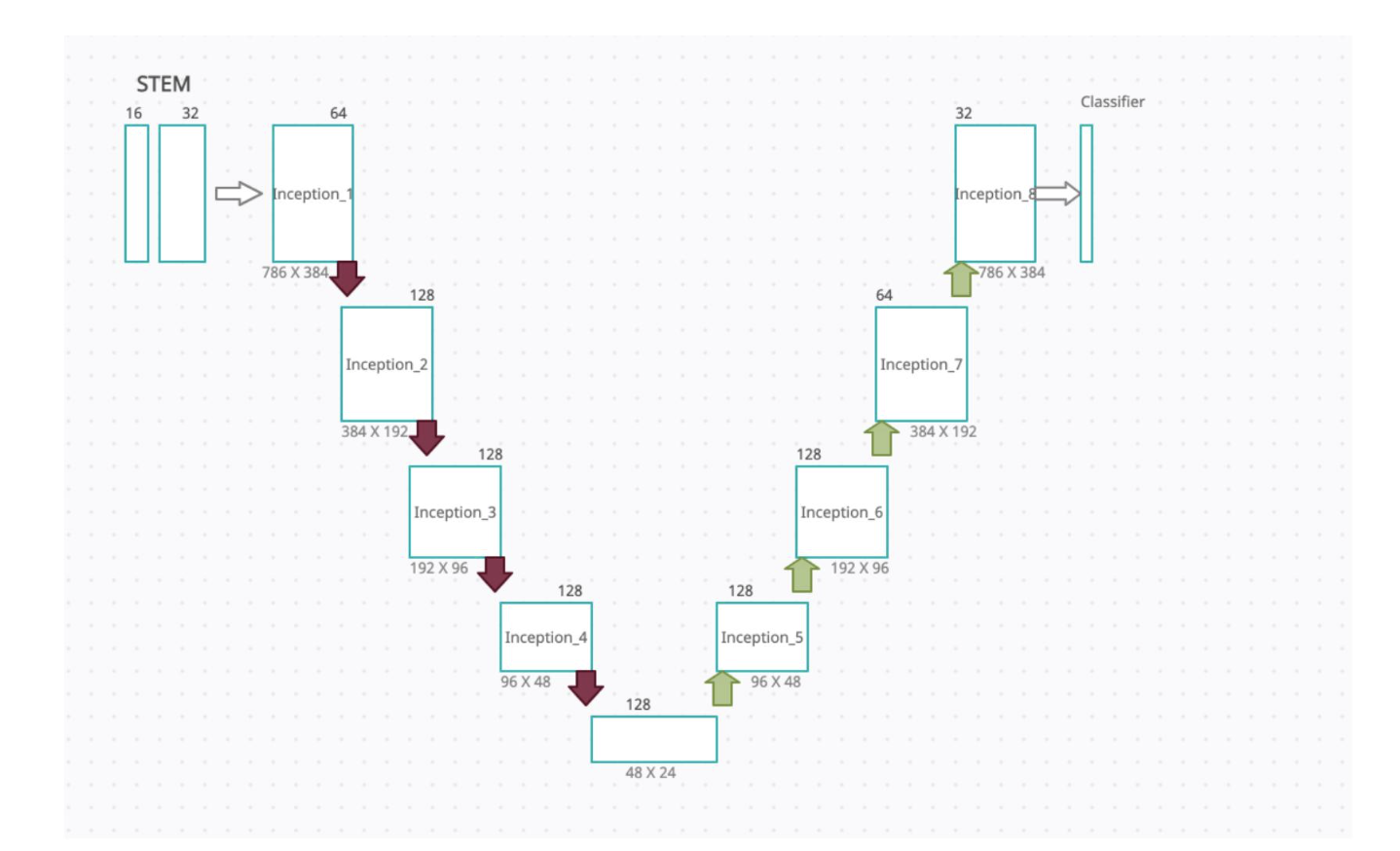
Semantic Segmentation using Inception
Developed an architecture inspired from UNet and Inception to segment images for Unstructured Driving Scenarios from TAS500 Dataset. The model was able to perform approx 5% better than the UNet, with 50% lesser parameters.
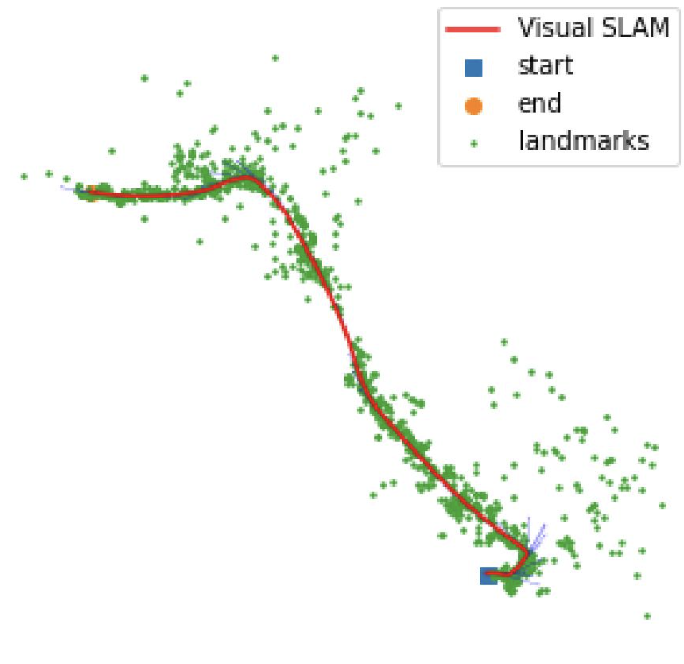
Visual Inertial SLAM using EKF
Built a 2D map of the environment and trajectory of the car using EKF prediction based on SE(3) kinematics with IMU data and EKF update based on stereo camera measurements from an autonomous car.
publications
Paper Title Number 1
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Paper Title Number 2
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2). http://academicpages.github.io/files/paper2.pdf
Paper Title Number 3
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3). http://academicpages.github.io/files/paper3.pdf
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.